
Technical challenges
- Safety aspects.
- Stability in the motion of the robot arm
- How to grip the signs in a robust and safe way.
- How to automatically manoeuver the gripper of the robot so that the robot can pick up the road sign.
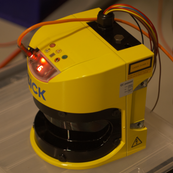
Safety
Safety is always a concern when using autonomous systems. To prevent accidents from occurring, the area by the truck where the arm operates is closely monitored so that no one or nothing is obstructing the arm. This is achieved with the help of the cameras which the operator can view from his terminal. In addition, a laser scanner mounted on the truck automatically detects all objects, persons or animals, and stops the robot motion automatically if they are in danger.
Road Sign Robot
In Sweden, one road worker is killed on average every other year in accidents related to erecting and placing warning road signs for road works. In a project sponsored by the Swedish Transport Administration (STA), Intelligent Machines was asked on behalf of the company Street Smart Equipment AB to investigate the technical possibilities of automating the task of putting up road signs with the purpose of increasing the safety of road workers. The first step was a feasibility study to identify a number of different possible solutions. These solutions were then analyzed with respect to various criteria such as cost, efficiency, robustness and difficulty of implementation. Based on the analysis, an experimental prototype was demonstrated to the STA and contractors in the road maintenance industry, all of which showed great interest in the technology. No decision has yet been taken to commence production of a real prototype for testing in field trials.
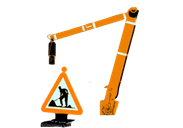

Technology description
The experimental prototype consists of a self-developed robotic arm mounted on a flatbed truck. The arm is not hydraulically driven but instead powered by 4 servo motors in order to achieve the best accuracy possible. The control system includes a vision system with several cameras and one laser scanner. The control system controls the arm to automatically and securely deploy and retrieve road signs. On the truck bed an appropriate variety of different road signs have been loaded before commencing work. The robotic system is controlled by the operator who is also driver of the truck. The user interface consists of a wireless and rugged touch screen with a graphical interface. The screen displays all necessary information, including images from the two cameras. In the experimental prototype, the process of picking up the signs is done manually, other movements are performed automatically. However, there are no technical obstacles in making the grabbing of the signs automated as well. In order to grab the signs regardless of their inclination, the robot was equipped with a specially designed gripping device. The experimental prototype is also equipped with a comprehensive security system to prevent human injuries. The control system and the servo drives are both redundant systems in hardware and software.
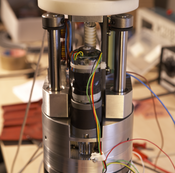
Gripping device
One of the difficulties in this project was how to automatically grab the signs when signs were tilted and leaned heavily. For safety requirements, the gripping of the signs was always required to be performed in a safe way regardless of the inclination. There must not be any position to where the sign can come loose of the gripping device. The problem was resolved by developing a special gripping device which grasps a special connector on top of each sign. The device is mechanically fail-safe.
Fact box
- IM has done a feasibility study that maps various possible techniques and concepts.
- IM has made a requirements specification and a system solution.
- IM has developed the software, hardware and mechanics for an experimental prototype.
- IM has built an experimental prototype and conducted experiments in full scale which verifies the selected technology solutions.